Who I am
I am Francesco Cursi, a PhD graduate at Imperial College London. I was part of the Hamlyn Centre for Robotic Surgery and of the Robot Intelligence Lab.
I am currently a Senior Research Engineer focusing on Machine Learning for Robot Control.
I am a relentless and curious person, who likes learning and growing day by day. I thrive in environments where sharing ideas and knowledge are the order of the day.
I am deeply attracted by technology and innovation, and always looking for opportunities to make an impact in the society.
Check out My Journey, for a brief summary of my experiences; My Research, for a quick view of my research interests and topics; My Other Passions and Activities for additional info on what I like and enjoy doing.
My Journey
I was born in Rome, Italy, in 1992. When I was a young boy I dreamed of becoming a scientist (I don’t even know where this came from, as nobody in my family is even close to science at all 😂). Because of this passion for science, I have always been attracted by science documentaries, especially those about physics and technology. By growing older, my interest switched a bit more towards applied sciences as I wanted to build cool stuff. I remember spending hours disassembling all my toys and almost everything I found at home.
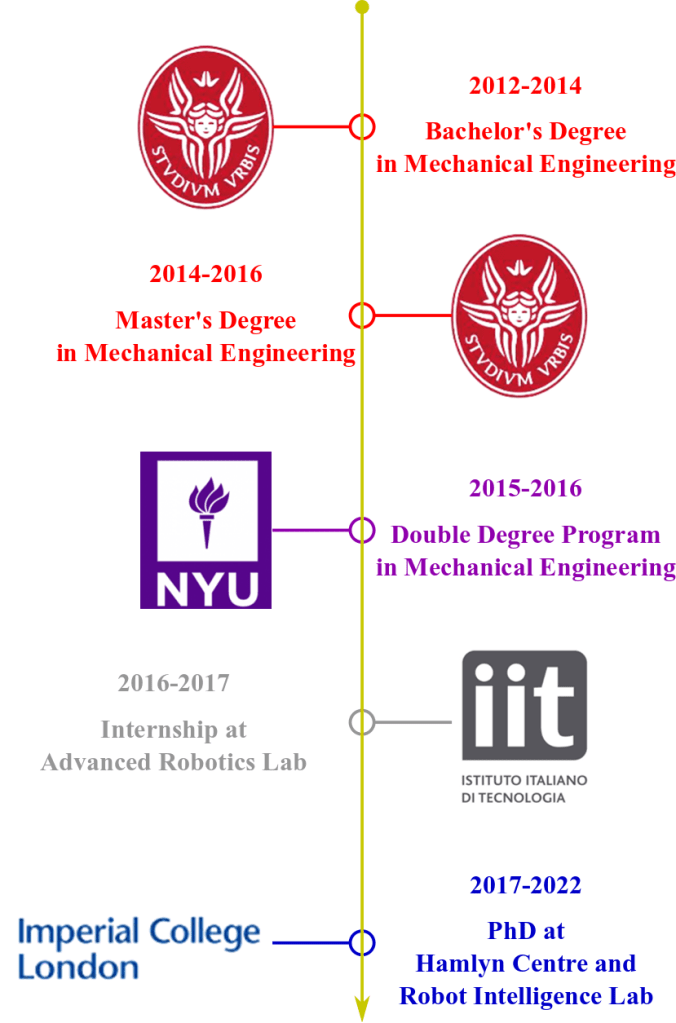
Because of my interest in maths, physics, and technology I decided to enroll in Mechanical Engineering at Sapienza University of Rome. Actually, this was not my first choice, as I was planning to do Aerospace Engineering, but I was suggested that I would have gained a broader knowledge with Mechanical.
Unfortunately, the curriculum was not including one of the subjects I was starting to deeply love for its future impact and multidisciplinarity: Robotics. As I am a very determined person, however, I asked for a change in the curriculm and I had the chance to enroll in the robotics class hold by Prof. Alessandro De Luca, one of the best known experts worldwide in the field. I really like that class that I decided to focus my studies in Automation and Robotics for my Master’s.
During my Mater’s degree I could deepen my knowledge in robotics and control and I had the great chance to be selected for a Double Degree Program with NYU Tandon School of Engineering. I then spent my last year of the Mater’s in New York City 🤩 and this was one of the best experiences I could ever had, both for personal and professional growth. In NYC I focused even more on robotics, taking classes in mechatronics and control. For my Mater’s thesis I joined the Applied Dynamics and Optimization Lab and I was jointly supervised by Prof. Joo H. Kim (from NYU) and Prof. Leonardo Lanari (from Sapienza). My research was on a method to estimate states of balance of humanoid robots and on comparing it with those of a human being, which resulted in my first publication at the 2016 IEEE-RAS International Conference on Humanoid Robots (Humanoids) , held in Cancun that year (super lucky LOL).
My passion and interest for robotics, control, and machine learning kept increasing and so I decided to pursue a PhD in order to deepen and broaden my knowledge in those fields. While waiting for starting the PhD, I applied for an internship at the Italian Institute of technology (IIT), the greatest research center in Italy, especially in robotics and advanced technologies. There I joined the Humanoids and Human Centered Mechatronics Lab under supervision of Dr. Nikos Tsagarakis and Dr. Jorn Malzahn. This was a really great experience for my professional growth as I could work on real robots (and in IIT they have many) and share knowledge with some of the most experienced people in robotics I have ever met. My focus at IIT was on calibrating force/torque sensors used in the different humanoid robots from the lab, and I came up with a novel method and a visualization interface that led to another publication at Humanoids 2017 (this time in Birmingham).
These past experiences then allowed me to be accepted for a PhD at Imperial College London at the Hamlyn Centre under supervision of Prof. Guang-Zhong Yang. In September 2019 I also joined the Robot Intelligence Lab under supervision of Dr. Petar Kormushev. Ever since I started this journey, I have been focusing on surgical robotics. My goal has been to make surgical robots safer and more accurate, in order to be easier to control and reduce patients’ traumas. My work has been pretty differentiated, with research in machine learning for robot modelling, optimization and optimal control, optimization of robot design, etc. For further information about my work, please head to my blog.
Durin my PhD, from July to October 2021 I was selected to join Amazon as Pathways Operations Intern. Amazon Pathways Operations Program is a career accelerator in Amazon to develop leadership and management skills. I decided to undertake that experience to challenge myself in a completely new environment (far from academia) and to assess my leadership and management skills. Beside supervising and managing associates and drivers during the loading of the vans in the delivery process, I also developed two software tools in VBA: one for automated data analysis of the metrics I was in charge of; one to automate the way drivers were checked-in when entering the station and faciltate the process for the yard marshalls (the associates in charge of supervising the yard during the loading phase).
My Research
During my journey I have focused on different topics all residing at the intersection of robot control, machine learning, optimization and otpimal control.
My main PhD focus has been on surgical robotics, which is a relatively new field in robotics and automation and which is going to be a reality in the very next future. Nowadays, most of the surgical robots are still teleoperated, meaning that there is a human surgeon that controls a kind of “joystick robot” (the master robot), and then the surgical robot (called slave robot) replicates the motion of the surgeon. This is supposed to augment surgeons’ capabilities, improving dexterity, accuracy, and precision. However, there are still many technical issues (beside the ethical ones) that still limit the use of robots in surgery both in teleoperation and in full autonomy.
One of the main problems is in robot modelling. Robots in general, and surgical robots specifically, are becoming more and more complex, with many links and joints, with a continuous push towards more flexible robots that are more compliant with the environment and thus safer. The problem is that modelling these robots analytically is very challenging. Another problem is in robot control. The difficult-to-obtain model of the robot, the complex nonlinearities in the actuation (these robots are typically driven by tendons like in the human hand) make the control very difficult.
What I have been working on is on different techniques to model these complex systems and use these models for control. I have been employing various machine learning approaches for the modelling, ranging from Artificial Neural Networks, Bayesian Neural networks, Gaussian Process Regression, which allow learning complex functions from the collected robot’s data. As for the control, I have been focusing on optimal control techniques like Quadratic Programming and Model Predictive Control which allow computing the optimal control variables, given a desired robot motion.
As side projects, I have been developing different open-source packages for more general robot modelling and analysis.
My research has been presented and published at top robotics conferences and journals such as IROS, ICRA, RAL, TRO, TMRB. For more in-depth details about research work, please check my blog section and to my publications.

Other Passions and Activities
If there is something I am really passionate about and that I really like is coming up with new ideas and innovate, trying to make an impact in the society. Moving to London for my PhD has allowed me to be immersed into a large variety of events and opportunities to network with others and experience the world of start-ups.
In 2018 during a networking event I got to know a dear friend of mine now who was intended to start a company to automate biological laboratory experiments by means of cloud computing and robotics. With him and other friends we then worked on Experoment, a cloud-based automated workcell with a robotic arm and automated machines capable of conducting biological protocols by itself. Even though we didn’t manage to raise enough funding for it to continue, it was an amazing experience working with the team on this great idea.
As my willingness for innovation has not stopped (it is actually greater than ever 🤣) I have also been offering some advice and consulting to other people and friends who need help with the robotics and machine learning side of their projects.
I have been involved in projects for image classification of trash, for financial credit risk modelling, for software automation for web searches.
Besides just working and trying to innovate, I also enjoy doing sport. So I generally say that I work out, both physically and mentally 😅 . I like going to the gym and swim during my free time, and I also enjoy playing soccer (even though it’s been a while now since I last played Lol). During summer I really enjoying being outdoors at some park and read some good books on innovation, leadership, personal development.
