Accepted for publication in IEEE IROS 2021-International Conference on Intelligent Systems and Robots
Description:
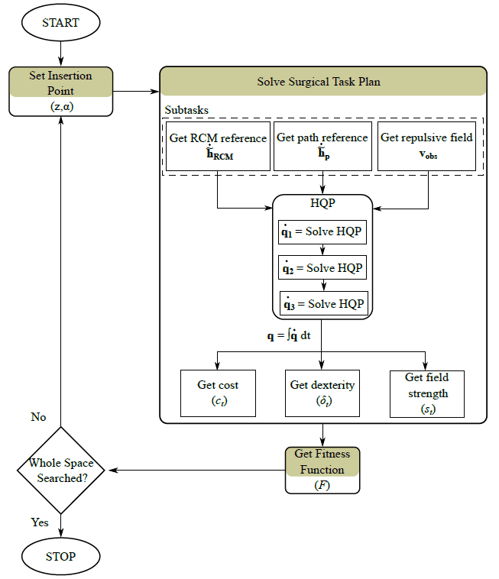
In this work we present an optimization approach to identify the optiaml insertion point location for laparascopic surgeies when employing macro-micro robotic manipulators.
Our results show how the location of the Remote Center of Motion (RCM) afects the robot’s perfomance.
The cost function takes into account safety in avoiding nearby organs, maximizing robot’s dexterity, and ensuring precision in perfoming a specified task (path tracking for tumor resection).
Our cost function and resilence to error strategy ensure the optimal location resides in a region with small variations in the perfomance in case of deviations from the optimum.