Accepted for publication in IEEE Transaction on Robotics (TRO), 2022
Description:
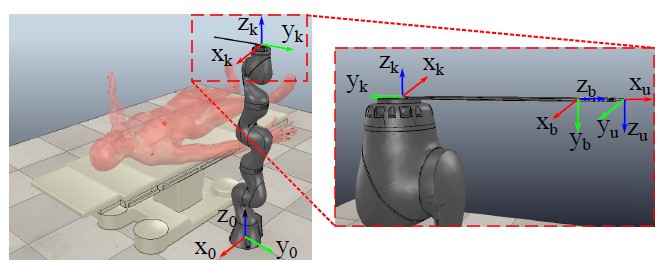
Surgical robots for Minimally Invasive Surgery are generally mounted on serial-link manipulators with the aim of increasing the number of Degrees of Freedom (DOF) of the system. This setup is called macro-micro manipulator.
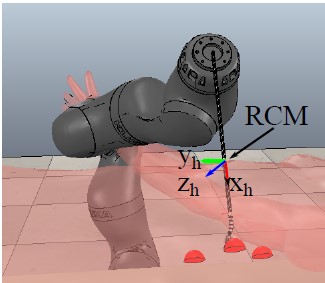
The serial-link manipulator can then be directly ivolved in the control problem to perform a surgical task, by, for instance, ensuring appropriate motion at the surgical tool’s insertion point (also known as Remote Center of Motion).
The mounting configuration, however, has large impact on the performance of the overall system in terms of motion accuracy and dexterity.
The macro-micro manipulator setup
The Remote Center of Motion at the tool’s insertion point
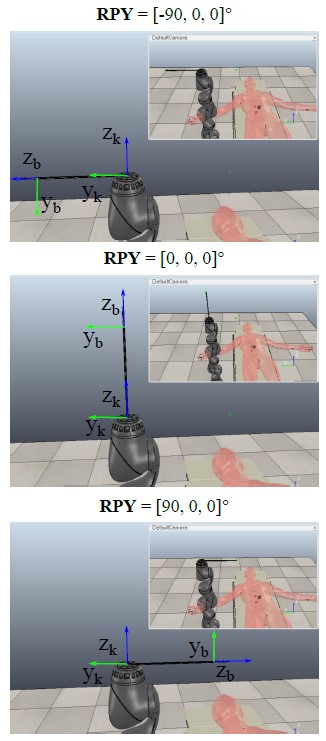
In this work we analyse how different mounting configuartions, expressed in terms of Roll, Pitch, and Yaw angles between the serial-link end-effector’s and the surgical robot’s base frame, affect the macro-micro manipulator’s performance when executing a surgical task.
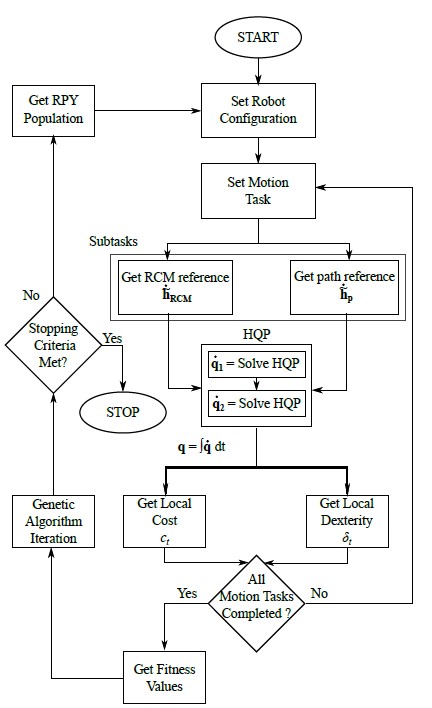
We also propose an approach based on Genetic Algorithm to find the optimal configuration that maximizes the robot’s dexterity and accuracy.
Example of different mounting configurations
The optimization and control workflow
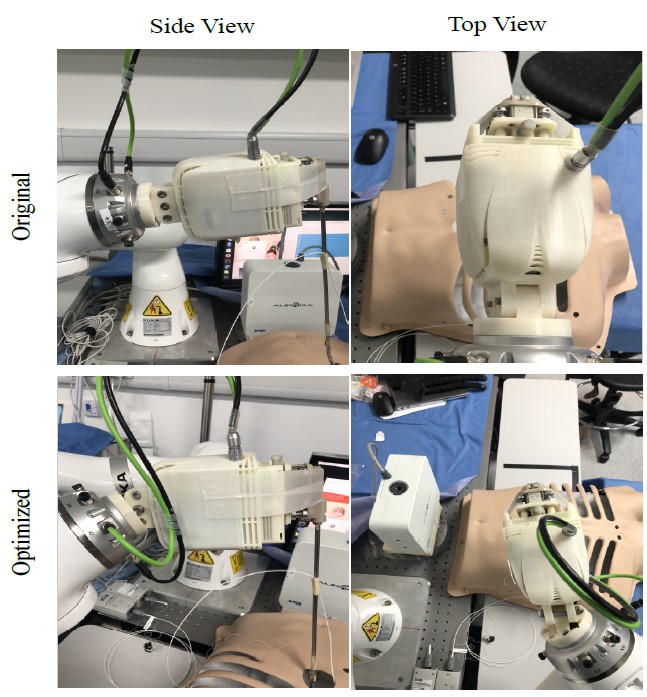
Our results show that some mounting configurations lead to very poor perfomance. The approach has been validated also on a real setup and employed to design a more optimal configuration for our system.
Simulation results showing how some configurations can lead to very poor perfomance and how the optimal configuration can enhance the robot capabilities.
Accepted for publication in IEEE Robotics and Automation Letters (RAL), 2022
Description:
Robot kinematics is a fundamental basis for robot control. The kinematic model finds the relationship between actuation space (mtor/joint values) and Cartesian space (robot’s 3D position and orientation).
Generally, for serial-link rigid robots, geometric approaches (e.g. Denavit-Hartenberg convention) are sufficient to obtain accurate an kinematic model. However, robot designs are becoming more and more complex, especially in fields like minimally invasive surgery, where high degree of articulation and miniaturization are required.
Standard serial-link manipulator
Continuum robot
Due to the increasing modelling complexity, machine learning, like Artificial Neural Networks, has become very useful for robot modelling. Generally two approaches are used:
Inverse Kinematic (IK) modelling: the inputs are the desired robot’s poses to reach and the outputs are directly the robot’s motor commands;
Forward Kinematic (FK) modelling: the inputs are the motor commands and the outputs are the robot’s poses.
Learning the IK allows directly obtaining the robot’s commands, but the output only depends on the training strategy and data. When learning the FK, instead, the robot model can be used in consolidated optimal control approaches (like MPC, QP, etc) that guarantee better system’s stability and allow finding optimal control values for a given task.
The drawback of learning the FK is that derivatives of the model are needed for control purposes and, in general, robot model learning does not consider differential relationships during model training.
Additionally, when the orientation is considered, a proper representation is needed in order to ensure continuity in the model to be built.
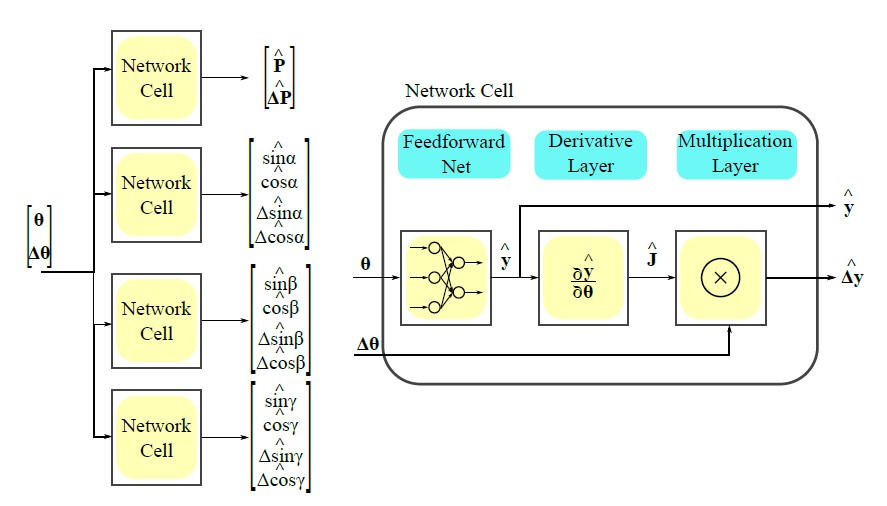
In this work we present AugNet, a neural network model that includes differential relationships during model learning for full robot pose (both 3D position and orientation). Additionally, we propose a feasible representation (trigonometric representation) for the orientation to overcome the challenges due to model discontinuities.
AugNet model for position and orientation learning.
Our results show that including differential relationships during model learning allows improving robot model’s accuracy and control performance. Additionally, our trigonometric representation proves feasible in learning orientations.
In our work we employed Roll, Pitch, and Yaw angles. The main limitation from the control perspective is the possibility to encounter singularities due to Gimbal lock.
Simulation results, comparing AugNet with a standard learning approach (FFNet), on a serial-link manipulator and on a soft robot model
Real world experiments controlling a KUKA arm with the learnt AugNet model
It has been already more than one year since I created my own (first) NFT (Non Fungible Token) collection named Braino. It consists of 5000 pictures with different unique features.
I will soon release it on the most popular NFT platforms and make a post on how I made it.
You can here take a look at some of the items of the collection. Hope you like it 😁
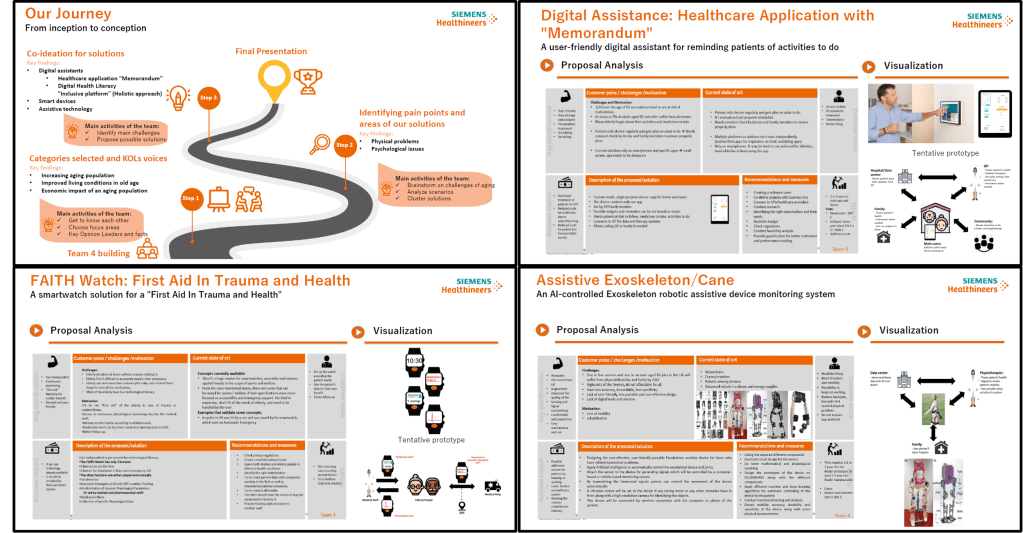
The program focuses on open innovation and co-creation of business ideas in healthcare, and participants get the opportunity to learn co-implementation approaches by working on real life challenges from healthcare systems.
It has been an interesting experience to challenge myself in finding solutions to help elderlies in our society and to test my team-wroking, collaboration, and creativity skills.
With my team (randomly chosen by the organizers) we proposed:
Memorandum: “A digital home assistant to remind patients of activities to do“
FAITH Watch: “Fisrt Aid In Trauma and Health”
Assistive suits to help with mobility
The main points of my ITT journey and the three proposed solutions
During the program we identified challenges elderlies are facing nowadays and future challenges of the increasingly aging population.
We then came up with the possible solutions and made a simplified business analysis that we pitched to the organizers on our final day.
In this work we present two novel strategies for training Feedforward Artificial Neural Networks (ANN) to learn robot’s forward kinematics (3D position only).
Generally, ANN are used to diectly learn the mapping from actuation space to Cartesian space using a cost function that just minimizes the error between the predicted tip position and the measured (ground truth) one.
For control purposes, however, the velocity mapping is exploited. This information is neglected instandard ANN training.
The two novel loss functions include information about the differential reletionship between positions and velocities to incorporate knowledge on the velocity mapping too while training the model for the forward kinematics.
Our results show large improvements in model learning and control when the differential relationship is included.
Exemplary simulation results on using the different loss functions. P Loss is the standard one used in ANN. PV and PVI Loss account for vleocity and inverse velocity mapping
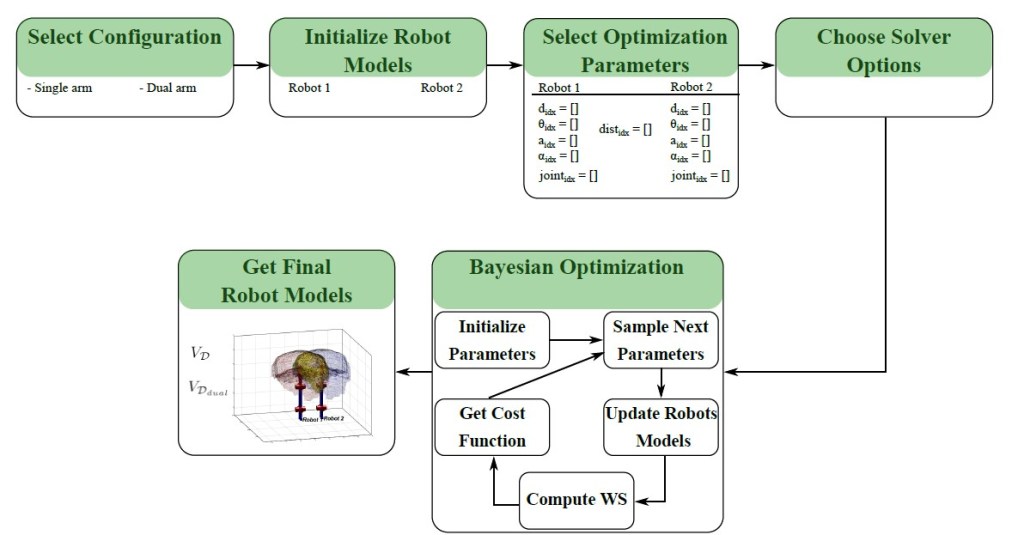
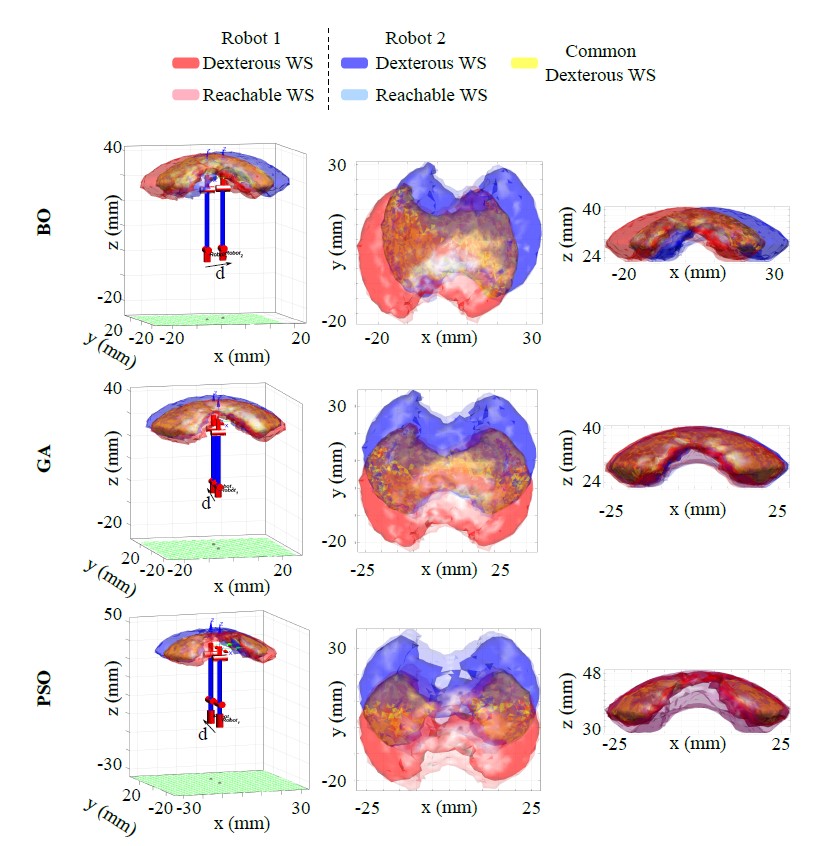
In this work we present GlobDesOpt, a simple-to-use Matlab package for robot manipulator design.
Currently, it only focuses on serial-link manipulators to optimize different user-defined parametrs such as link lenghts, joint offsets, joint types (prismatic or revolute).
It allows the user to choose between three solvers:
BO: Bayesian Optimization;
PSO: Particle Swarm Optimization
GA: Genetic Algorithm
Currently, the optimization cost function aims at maximing the robot dexetrous workspace.
The framework can be used for single or dual-arm robots.
For dual-arm robots, the distance between the two arms can be set as additional optimization variable and the current cost function maximizes the dual-arm dexterity within the common dexterous workspace.
Exemplary results using GlobDesOpt solvers for dual-arm robot design
I am happy to announce that from July to October 2021 I joined Amazon as Pathways Operations Intern.
Amazon Pathways Operations is a career accelerator in Amazon to develop leaders to become Amazon General Managers and Directors.
During my internship (which occurred during my PhD) I was in charge of imporving a metrics measuring the number of drivers entering and leaving the delivery station in time. Beside supervising and managing Amazon associates and drivers during the loading of the vans I also developed two tools in VBA for excel:
one to simplify and automate the data analysis and visualization for the metrics I was in charge to monitor;
one to automate the process in checking in the drivers when entering the station. This process was done manually, with the associates manually writing down on paper the number of vans entering the station and keeping track of how many were late. With my tool, the whole process was automated and it leveraged information extracted from scraping Amazon’s dashboards to understand when a driver was supposed to arrive, the best location to park each avn, the missing drivers.