Accepted for publication in IEEE Robotics and Automation Letters (RAL), 2022
Description:
Surgical robots are very complex systems, due to the requirements for miniaturization and high dexterity. This leads to highly articulated and complex designs to increase the system’s felxibility and dexterity, while the miniaturization requirement leads to the choice of non-traditional actuation systems like tendons.

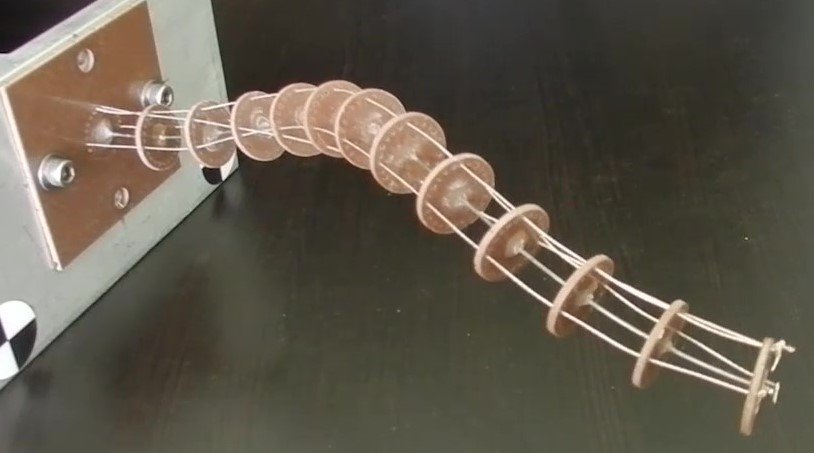
Differently from traditional serial-link manipulators, generally used in the manufacturing industry, tendon-driven robots do not have motors directly on the joints, but they are placed on the robot’s base and connected to the joints by means of wires (the tendons).
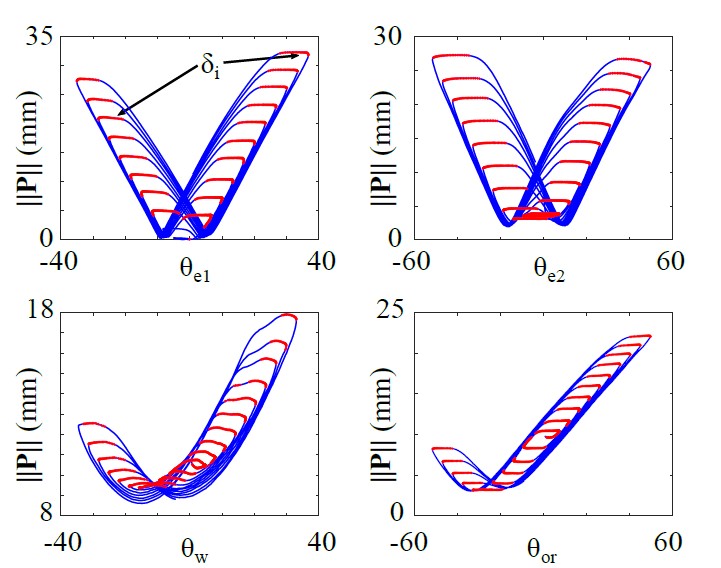
This setup causes a lot of complexities in the system due to high nonlinearities due to tendon friction, slack, tendon elongation, that, in turn, cause effects like backlash and hysteresis.
Hystereis is phenomenon that causes a system not to behave in the same way when moving in a direction or in the opposite one. Backlash occurs when a change in motion direction occurs and, despite commanding non-null velocities, the system lies in a deadzone and does not move. In tendon-driven system this is typically due to the tendon elongation and possible slack when motors change their direction of motion.
Machine learning (ML) techniques have been very efficient in building complex robot models, especially for surgical robots that are very hard to model. These approaches, however, do not consider andy a priori knowledge of backlash and hysteresis and if and end-to-end black box model is used, the model should be able to inherently learn a compensation strategy. This makes the application of ML moelling tedious in surgical robots.
In this work we propose a backlash compensation technique and use Artificial Neural Networks to model the complexities of a tendon-driven surgical robot from the compensated values.
The a priori backlash compensation is used to reduce the nonlinearities in the system and make it easier to learn a more accurate and simpler robot model.
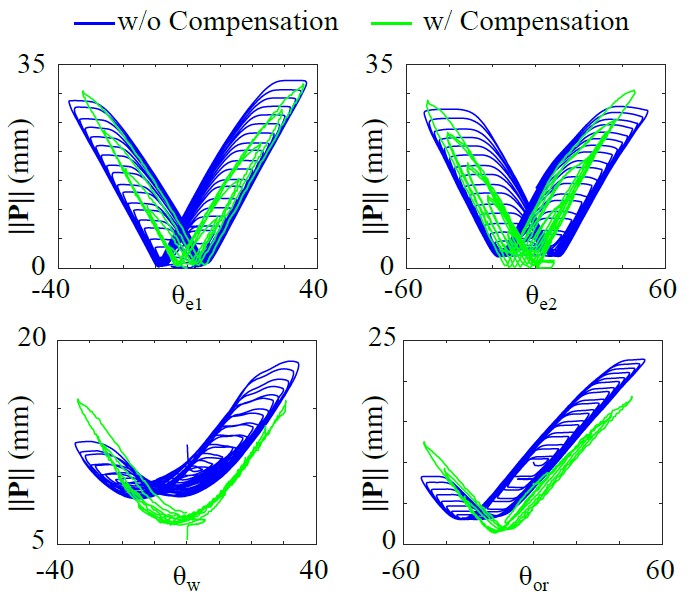
With our backlash compensation approach we could reduce the occurrence of deadzones by 89%, thus limiting the stationary motion of the robot.
We then employ two different approaches to model our robot (a traditional ANN and our proposed AugNet, which incorporates differential relationships during training) and performed path tracking tests with and without the backlash compensation.

Our results show the importance of compansating for high nonlinearities before using ML approaches and that our compensation approach helps improving system’s tracking accuracy.