Accepted for publication in IEEE Transaction on Robotics (TRO), 2022
Description:
Surgical robots for Minimally Invasive Surgery are generally mounted on serial-link manipulators with the aim of increasing the number of Degrees of Freedom (DOF) of the system. This setup is called macro-micro manipulator.
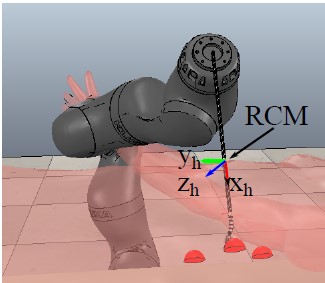
The serial-link manipulator can then be directly ivolved in the control problem to perform a surgical task, by, for instance, ensuring appropriate motion at the surgical tool’s insertion point (also known as Remote Center of Motion).
The mounting configuration, however, has large impact on the performance of the overall system in terms of motion accuracy and dexterity.
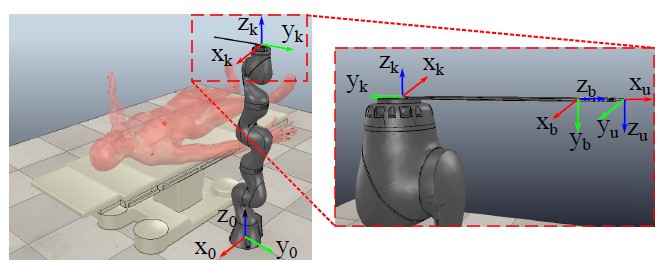
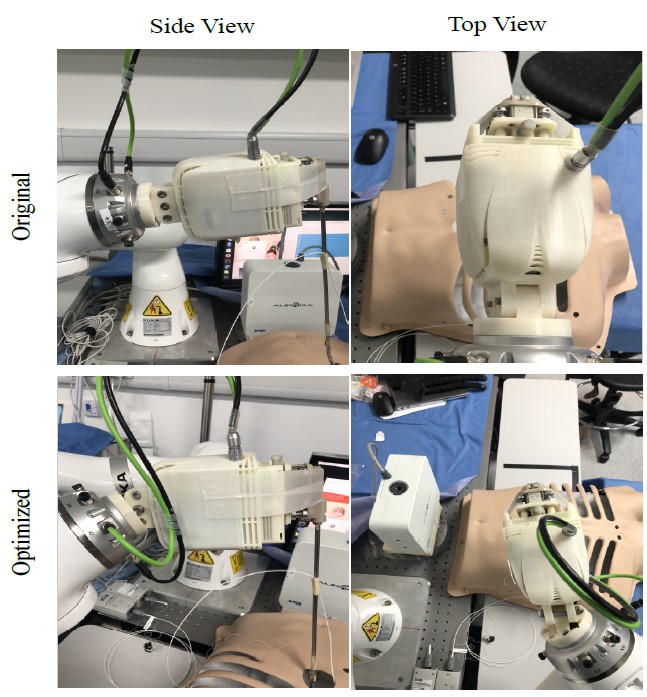
In this work we analyse how different mounting configuartions, expressed in terms of Roll, Pitch, and Yaw angles between the serial-link end-effector’s and the surgical robot’s base frame, affect the macro-micro manipulator’s performance when executing a surgical task.
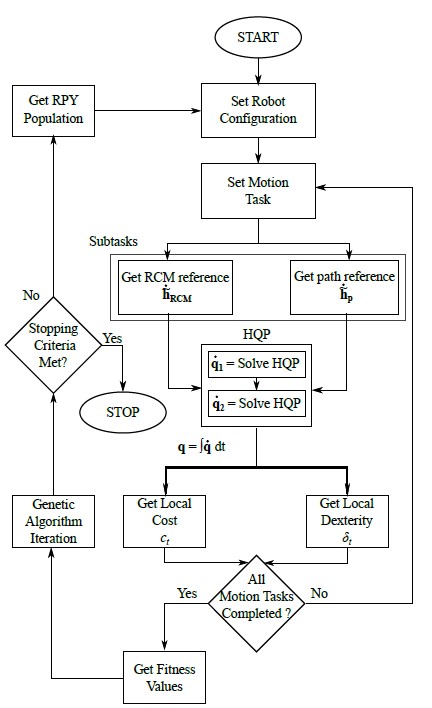
We also propose an approach based on Genetic Algorithm to find the optimal configuration that maximizes the robot’s dexterity and accuracy.
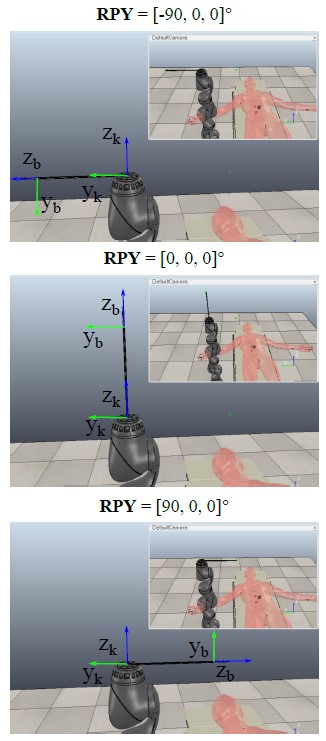
Our results show that some mounting configurations lead to very poor perfomance. The approach has been validated also on a real setup and employed to design a more optimal configuration for our system.

One thought on “Optimization of Surgical Robotic Instrument Mounting in a Macro-Micro Manipulator Setup for Improving Task Execution”