Accepted for publication in IEEE Access, 2022
Available in Git-Hub.
Description:
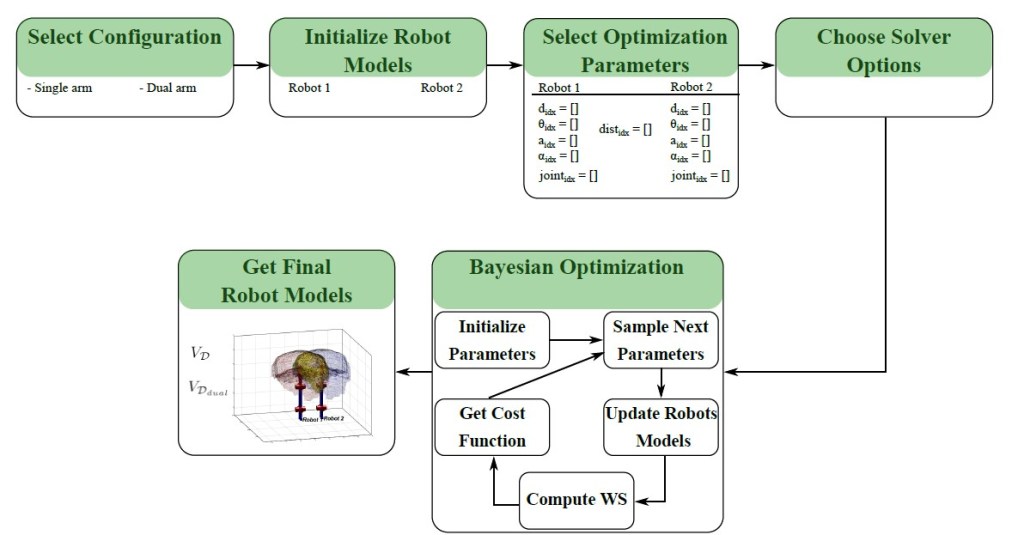
In this work we present GlobDesOpt, a simple-to-use Matlab package for robot manipulator design.
Currently, it only focuses on serial-link manipulators to optimize different user-defined parametrs such as link lenghts, joint offsets, joint types (prismatic or revolute).
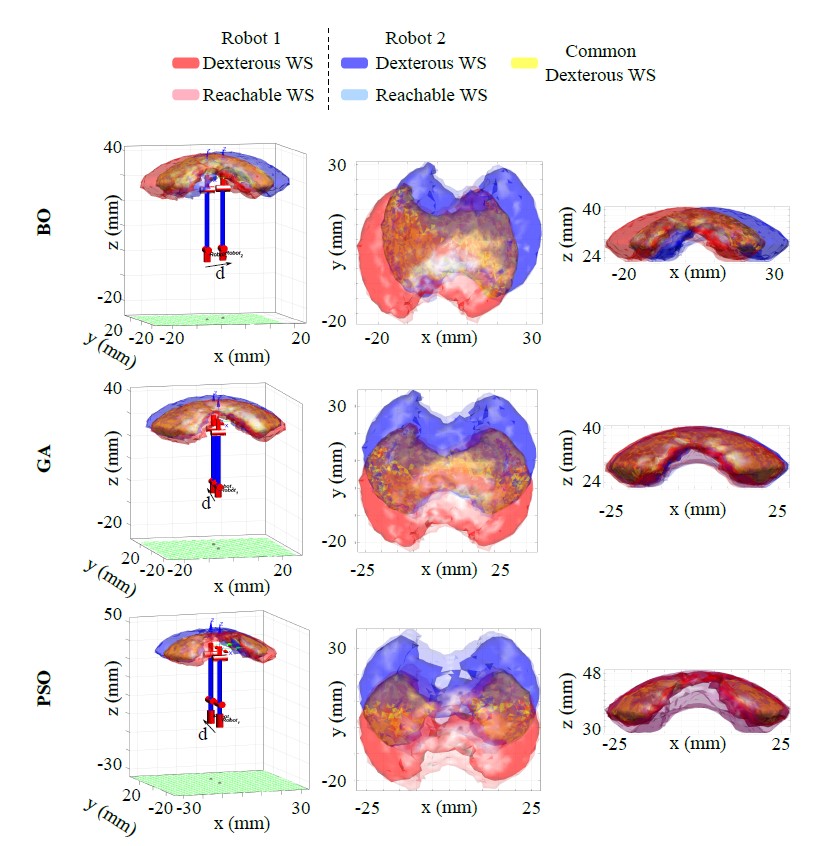
It allows the user to choose between three solvers:
- BO: Bayesian Optimization;
- PSO: Particle Swarm Optimization
- GA: Genetic Algorithm
Currently, the optimization cost function aims at maximing the robot dexetrous workspace.
The framework can be used for single or dual-arm robots.
For dual-arm robots, the distance between the two arms can be set as additional optimization variable and the current cost function maximizes the dual-arm dexterity within the common dexterous workspace.