Accepted for publication in Robotics and Automation Letters (RAL) and ICRA 2021- International Conference on Robotics and Automation.
Description:
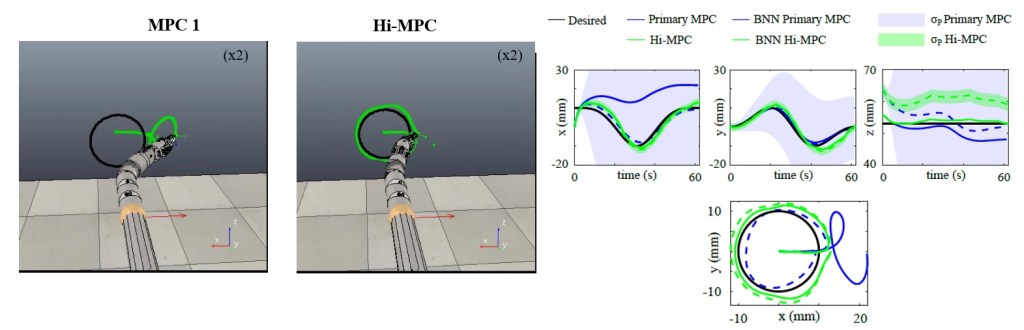
In this work we present a Hierarchical Model Predictive Control (Hi-MPC) approach in conjunction with Bayesian Neural Networks (BNN) to model and control a tendon-driven surgical robotic tool.
BNN are here employed because they allow obtaining not only the model prediciton, but also the associated model uncertainty.
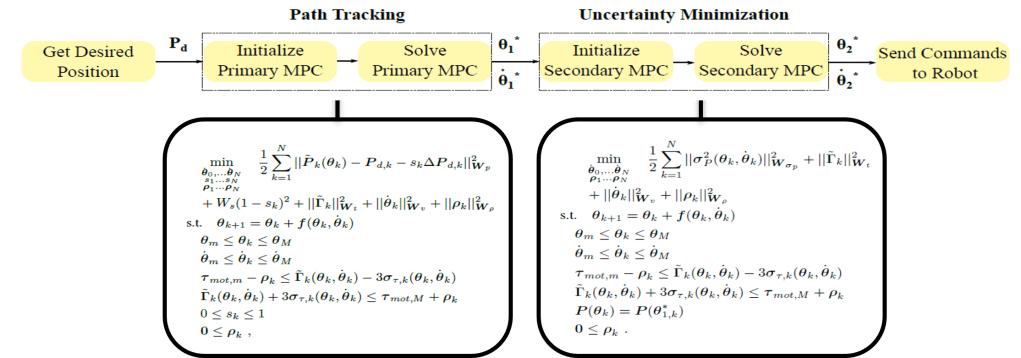
The Hi-MPC is instead used to solve two prioritized subtasks:
- primary task: tracking a desired path;
- secondary task: ezploit the robot redundnacy and minimize the model’s uncertainty so as to reconfigure itself in more reliable state space regions.
Our simulation and real world experiments show that the uncertainty minimization helps imrpoving the control performance and make the path tracking more accurate.