Accepted for publication in IROS 2020- International Conference on Intelligent Robots and Systems.
Description:
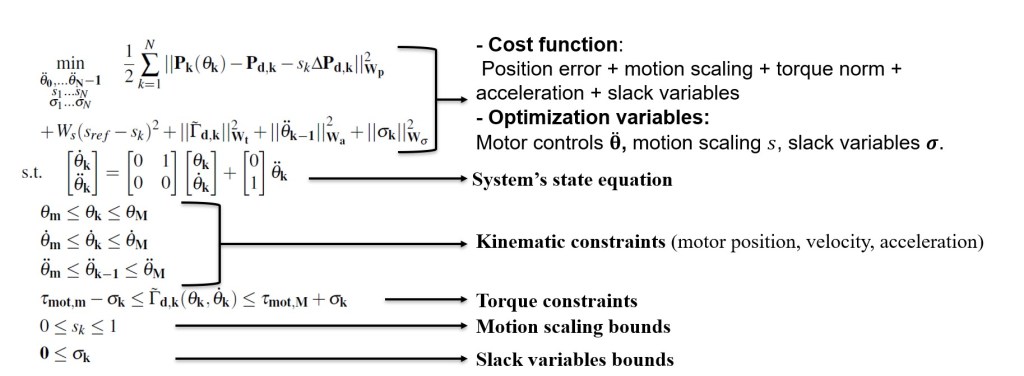
In this work we evaluate the applicatbility of Model Predictive Control (MPC) to control a tendon-driven surgical robotic tool. The dynamic model of the robot is learnt by means of Artificial Neural Networks (ANN) and used to impose bounds on the dynamics of the system.
We evaluate our approach on different bounding values.

